一、軟件系統(tǒng)
| 模塊 |
功能/內(nèi)容 |
技術(shù)實(shí)現(xiàn)/形式 |
| 無人機(jī)(穿越機(jī))基礎(chǔ)(戰(zhàn)術(shù))訓(xùn)練接口平臺(tái) |
識(shí)別無人機(jī)遙控器接口的HID輸出信號(hào)。 |
- 使用USB HID協(xié)議解析遙控器信號(hào)。
- 通過串口或無線通信(如Wi-Fi、藍(lán)牙)獲取無人機(jī)傳感器數(shù)據(jù)。
- 提供API接口,便于與訓(xùn)練課程和考核模塊集成。
|
| 實(shí)時(shí)讀取并解析無人機(jī)的RETA(Roll, Elevation, Throttle, Aileron)角度數(shù)據(jù)。 |
| 理論課程 |
無人機(jī)工作原理(動(dòng)力系統(tǒng)、飛控系統(tǒng)、通信系統(tǒng))。 |
- 視頻課程、圖文教程、交互式問答。
- 提供課后測試,鞏固理論知識(shí)。
|
| 氣象條件對(duì)飛行的影響(風(fēng)速、溫度、濕度)。 |
| 航空法規(guī)與飛行安全(空域管理、飛行許可、應(yīng)急處理)。 |
| 無人機(jī)分類與應(yīng)用場景(消費(fèi)級(jí)、工業(yè)級(jí)、軍用級(jí))。 |
| 無人機(jī)維護(hù)與保養(yǎng)(電池管理、電機(jī)檢查、螺旋槳更換)。 |
| 飛行倫理與隱私保護(hù)。 |
| 飛行訓(xùn)練 |
基礎(chǔ)目視科目:直線飛行、轉(zhuǎn)彎飛行、升降操作。 |
- 分步教學(xué):從簡單到復(fù)雜,逐步提升學(xué)員技能。
- 實(shí)時(shí)反饋:通過模擬器提供飛行數(shù)據(jù)(如高度、速度、姿態(tài))和錯(cuò)誤提示。
|
| FPV科目訓(xùn)練:第一視角飛行、障礙物規(guī)避、定點(diǎn)降落。 |
| 無人機(jī)控油懸停訓(xùn)練:保持無人機(jī)在固定位置懸停。 |
| 多面向不同高懸停:在不同高度和角度下懸停。 |
| 既定單一障礙飛行:通過單一障礙物(如圓環(huán)、墻壁)。 |
| 既定組合障礙飛行:通過多個(gè)障礙物的組合路線。 |
| 焦點(diǎn)懸停訓(xùn)練:在特定目標(biāo)點(diǎn)懸停。 |
| 既定障礙結(jié)合焦點(diǎn)懸停飛行訓(xùn)練:結(jié)合障礙飛行和焦點(diǎn)懸停。 |
| 戰(zhàn)術(shù)訓(xùn)練 |
快反焦點(diǎn)懸停:快速反應(yīng)并懸停在指定目標(biāo)點(diǎn)。 |
結(jié)合實(shí)戰(zhàn)場景,提供高難度飛行訓(xùn)練。 |
| 移動(dòng)目標(biāo)偵打:跟蹤并鎖定移動(dòng)目標(biāo)。 |
| 移動(dòng)載具打擊:對(duì)移動(dòng)載具進(jìn)行精準(zhǔn)打擊。 |
二、硬件設(shè)備
| 設(shè)備 |
規(guī)格/要求 |
| 模擬訓(xùn)練終端 |
屏幕尺寸不小于10.4寸。 |
| 內(nèi)存容量不小于128G。 |
| 運(yùn)行內(nèi)存不小于6G。 |
| 分辨率不低于2000*1200px。 |
| 傳感器:至少具備環(huán)境光傳感器、重力傳感器。 |
| 不少于四路揚(yáng)聲器。 |
| 電池不低于7700mAH,約11.5小時(shí)本地視頻播放。 |
| 配件:含5V/2A充電頭*1、標(biāo)準(zhǔn)Usb-C數(shù)據(jù)線*1、OTG轉(zhuǎn)USB母口數(shù)據(jù)信號(hào)轉(zhuǎn)換頭*1。 |
| 無人機(jī)操作遙控器 |
產(chǎn)品尺寸不大于170*159*108mm。 |
| 工作頻率:2.400GHZ-2.480GHZ。 |
| 天線增益不小于折疊2db。 |
| 控制距離不小于2km。 |
| 操作系統(tǒng):至少兼容OpenTX/EdgeTX。 |
| 控制通道支持不少于16通道。 |
| 支持USB-C直充。 |
| 具備霍爾搖桿。 |
| 支持通過USB或SD卡進(jìn)行固件升級(jí)。 |
| 三防安全箱 |
防水防塵等級(jí):≥IP67。 |
| 需支持放置全部訓(xùn)練器械。 |
需支持放置全部訓(xùn)練器械。
近程無人機(jī)系統(tǒng)模擬訓(xùn)練系統(tǒng)技術(shù)參數(shù)
(一)結(jié)構(gòu)說明
| 組件 |
描述 |
| 近程無人機(jī) |
用于模擬飛行訓(xùn)練。 |
| 便攜式模擬訓(xùn)練計(jì)算機(jī) |
運(yùn)行模擬訓(xùn)練軟件。 |
| 模擬訓(xùn)練器軟件 |
提供飛行仿真、載荷仿真等功能。 |
| 操控手柄 |
用于操作無人機(jī)。 |
| 轉(zhuǎn)接線纜 |
連接無人機(jī)和計(jì)算機(jī)。 |
| 包裝箱 |
用于存放和運(yùn)輸設(shè)備。 |
(二)用途與功能
| 功能類別 |
功能描述 |
| 總體功能 |
- 模擬系統(tǒng)能有效支撐模擬訓(xùn)練軟件運(yùn)行。
- 模擬訓(xùn)練軟件能夠模擬仿真實(shí)裝操作訓(xùn)練。
- 手持控制器可無縫對(duì)接實(shí)裝手持控制器。
- 無人機(jī)可接入手持控制器和便攜式操控終端等地面設(shè)備,實(shí)現(xiàn)基于實(shí)裝環(huán)境的操作訓(xùn)練。
|
| 模擬訓(xùn)練管理功能 |
- 具有學(xué)員信息和登錄管理等功能。
- 具有訓(xùn)練任務(wù)管理和特情設(shè)計(jì)等功能。
- 具有訓(xùn)練信息管理功能。
- 具有訓(xùn)練結(jié)果評(píng)定功能。
|
| 飛行仿真功能 |
具有無人機(jī)氣動(dòng)、動(dòng)力和飛控導(dǎo)航仿真功能。 |
| 載荷仿真功能 |
- 具有可見光電視的仿真功能。
- 具有非制冷紅外熱像儀的仿真功能。
- 具有激光照明器的仿真功能。
- 具有載荷穩(wěn)定轉(zhuǎn)臺(tái)和視頻跟蹤器的仿真功能。
|
| 數(shù)據(jù)鏈仿真功能 |
- 具有數(shù)據(jù)鏈全向和定向工作模式仿真功能。
- 具有數(shù)據(jù)鏈傳輸帶寬的模擬功能。
- 具有中繼雙機(jī)單控的模擬功能。
|
| 視景仿真功能 |
- 具有基于真實(shí)DEM數(shù)據(jù)和衛(wèi)星影像數(shù)據(jù)的場景構(gòu)建功能,任務(wù)場景范圍≥30km×30km。
- 具有雨、雪、霧等氣象環(huán)境仿真功能。
- 具有飛行器第三視角、載荷視角、地面視角等多視角切換功能。
|
| 實(shí)物飛行功能 |
可利用簡配無人機(jī)實(shí)現(xiàn)飛行訓(xùn)練。 |
(三)主要技術(shù)指標(biāo)參數(shù)
| 類別 |
參數(shù) |
| 仿真能力要求 |
具有訓(xùn)練仿真能力,實(shí)時(shí)完成無人機(jī)的飛行仿真、載荷仿真、數(shù)據(jù)鏈仿真和視景仿真等功能。 |
| 仿真頻率 |
- 三維渲染幀速率≥25FPS。
- 圖形成像仿真≥40FPS。
- 數(shù)值仿真≥12.5Hz。
|
| 計(jì)算機(jī)性能 |
- CPU主頻:≥2.8GHz。
- CPU核心數(shù)量:≥4核。
- 內(nèi)存容量:≥16GB。
- 硬盤類型:固態(tài)硬盤,硬盤容量:≥1TB。
- 顯卡類型:獨(dú)立顯卡,顯存容量:≥6GB。
- 顯示物理分辨率:≥1920×1080。
- 屏幕規(guī)格:≥17寸。
- 工作時(shí)間:≥3小時(shí)。
- 重量:≤3kg。
|
| 無人機(jī)性能 |
外形、飛控等基本性能高度相似部隊(duì)常用幾型無人機(jī)(包含但不限于如206、206A、827等)。 |
| 終端類型 |
- 10寸數(shù)圖遙一體控制器系統(tǒng)。
- 頻段≥3個(gè)頻段。
- 電池容量:≥20000毫安,連續(xù)工作≥4小時(shí)。
|
| 保管維護(hù) |
器材使用維護(hù)應(yīng)滿足維護(hù)簡單方便,部隊(duì)官兵經(jīng)過簡單說明培訓(xùn)即可較好維護(hù)保養(yǎng),對(duì)于故障及疑難問題,廠家要提供24小時(shí)技術(shù)支持。 |
機(jī)型列表
無人機(jī)模擬仿真訓(xùn)練與攻防演練系統(tǒng)
(一)系統(tǒng)概述
無人機(jī)模擬仿真訓(xùn)練與攻防演練系統(tǒng),基于某型無人機(jī)仿真裝備和軟件操作系統(tǒng),模擬實(shí)裝軟件功能,用以進(jìn)行某型無人機(jī)的操作使用訓(xùn)練和攻防演練,并可組織進(jìn)行考核、評(píng)估、分析。
無人機(jī)仿真訓(xùn)練專業(yè)教室可采用Windows操作系統(tǒng),軟件界面和響應(yīng)與實(shí)裝軟件基本一致。
無人機(jī)仿真訓(xùn)練系統(tǒng)的主要目標(biāo)是為學(xué)員提供一種在虛擬環(huán)境下進(jìn)行無人機(jī)訓(xùn)練和實(shí)踐的解決方案,以提高學(xué)員的無人機(jī)操作技能和應(yīng)對(duì)能力,并為無人機(jī)的運(yùn)營和應(yīng)用提供更好的支持和服務(wù)。具體來說,項(xiàng)目的目標(biāo)包括以下幾個(gè)方面:
| 目標(biāo) |
描述 |
| 無人機(jī)操控仿真訓(xùn)練 |
開發(fā)一套無人機(jī)操控仿真訓(xùn)練系統(tǒng),讓學(xué)員可以在虛擬環(huán)境下進(jìn)行無人機(jī)飛行操作,提高無人機(jī)操控的技能和應(yīng)對(duì)能力。 |
| 偵察任務(wù)模擬仿真訓(xùn)練 |
開發(fā)一套偵察任務(wù)模擬仿真訓(xùn)練系統(tǒng),讓學(xué)員可以在虛擬環(huán)境下學(xué)習(xí)和掌握無人機(jī)的偵察任務(wù)操作技巧。 |
| 任務(wù)導(dǎo)調(diào)系統(tǒng) |
開發(fā)一套任務(wù)導(dǎo)調(diào)系統(tǒng),讓教員可以在虛擬環(huán)境下進(jìn)行任務(wù)導(dǎo)調(diào)操作,提高無人機(jī)應(yīng)用的效率和安全性。 |
| 多人模擬攻防演練系統(tǒng) |
開發(fā)一套多人模擬攻防演練系統(tǒng),可以模擬紅藍(lán)雙方無人機(jī)的對(duì)抗場景,包括偵察、攻擊、防御等各個(gè)環(huán)節(jié)。 |
(二)執(zhí)行標(biāo)準(zhǔn)
| 標(biāo)準(zhǔn)編號(hào) |
標(biāo)準(zhǔn)名稱 |
| GJB438B-2009 |
《軍用軟件開發(fā)文檔通用要求》 |
| GJB2786A-2009 |
《軍用軟件開發(fā)通用要求》 |
| GJB3982-2000 |
《電子對(duì)抗裝備軟件開發(fā)要求》 |
| GJB2041-1994 |
《軍用軟件接口設(shè)計(jì)要求》 |
| GJB2115-1994 |
《軍用軟件項(xiàng)目管理規(guī)程》 |
| GJB9001C-2017 |
《質(zhì)量管理體系要求》 |
(三)功能指標(biāo)
| 功能類別 |
功能描述 |
| 1、基本功能指標(biāo) |
- 教員能夠基于導(dǎo)控端為學(xué)員提供作業(yè)標(biāo)準(zhǔn)。
- 學(xué)員利用訓(xùn)練終端,根據(jù)教員提供的作業(yè)條件展開訓(xùn)練。
- 學(xué)員可以在訓(xùn)練終端中選擇起飛場、降落場和應(yīng)急點(diǎn)位置。
- 學(xué)員可以利用訓(xùn)練終端進(jìn)行紅藍(lán)雙方無人機(jī)的戰(zhàn)術(shù)布置。
- 導(dǎo)控端可以依據(jù)學(xué)員提交的訓(xùn)練成果進(jìn)行判定成績和數(shù)據(jù)分析。
|
| 2、圖形顯示質(zhì)量指標(biāo) |
- 目標(biāo)顯示分辨率不低于實(shí)裝。
- 保證清晰度和加載速度的情況下,圖片不宜過大。
- 使用JPG、PNG、GIF等主流圖像存儲(chǔ)格式。
- 具備準(zhǔn)確的部件清單的bom標(biāo)注,以及結(jié)構(gòu)原理文字說明。
|
| 3、導(dǎo)控端指標(biāo) |
- 導(dǎo)控端配置有計(jì)算機(jī)和導(dǎo)控軟件。
- 導(dǎo)控軟件包括訓(xùn)練導(dǎo)控、戰(zhàn)場環(huán)境支撐、訓(xùn)練想定、信息采集、狀態(tài)監(jiān)控、訓(xùn)練評(píng)估等功能。
|
| 4、訓(xùn)練端指標(biāo) |
- 全系統(tǒng)含4套訓(xùn)練子系統(tǒng)。
- 每套訓(xùn)練子系統(tǒng)包括顯示器、VR頭顯設(shè)備、遙控手柄等。
|
3.導(dǎo)控端指標(biāo)
導(dǎo)控端配置有計(jì)算機(jī)和導(dǎo)控軟件。
導(dǎo)控軟件包括訓(xùn)練導(dǎo)控、戰(zhàn)場環(huán)境支撐、訓(xùn)練想定、信息采集、狀態(tài)監(jiān)控、訓(xùn)練評(píng)估等功能。
3.1 訓(xùn)練導(dǎo)控
| 功能 |
描述 |
| 導(dǎo)控端配置 |
配置有導(dǎo)控計(jì)算機(jī)、訓(xùn)練監(jiān)控計(jì)算機(jī)及導(dǎo)控軟件;支持訓(xùn)練計(jì)劃的新增、修改、刪除、下發(fā)功能。 |
| 訓(xùn)練進(jìn)程控制 |
支持訓(xùn)練開始、停止、暫停、繼續(xù)、加速、減速等實(shí)時(shí)控制。 |
| 訓(xùn)練導(dǎo)調(diào)干預(yù) |
支持動(dòng)態(tài)調(diào)整戰(zhàn)場環(huán)境情況、裝備狀態(tài)及所偵察目標(biāo)的能力參數(shù)、工作狀態(tài)、作戰(zhàn)方向、活動(dòng)路線,鍛煉學(xué)員飛行特情處置能力。 |
| 航線規(guī)劃與顯示 |
能夠接收學(xué)員所規(guī)劃的航線并同步將航線顯示在操控軟件上,提供修改、加強(qiáng)顯示和標(biāo)注等功能。 |
| 演示教學(xué) |
能夠進(jìn)行無人機(jī)操控終端軟件演示教學(xué)。 |
| 歷史數(shù)據(jù)回看 |
能夠進(jìn)行實(shí)裝歷史飛行數(shù)據(jù)的回看與分析。 |
3.2 戰(zhàn)場環(huán)境支撐
| 功能 |
描述 |
| 作戰(zhàn)環(huán)境模擬 |
實(shí)現(xiàn)作戰(zhàn)地圖功能,可設(shè)置作戰(zhàn)地點(diǎn)與地理環(huán)境。 |
| 作業(yè)條件設(shè)置 |
導(dǎo)控端可以設(shè)置作業(yè)條件,為各訓(xùn)練終端提供目標(biāo)信息,選擇天候、地形等環(huán)境。 |
| 天氣類型 |
包括晴天、多云、雨、雪、霧等天氣。 |
| 地形類型 |
包括平原、丘陵、城鎮(zhèn)等。 |
3.3 訓(xùn)練想定
| 功能 |
描述 |
| 目標(biāo)設(shè)定 |
可設(shè)定目標(biāo)的種類、位置、數(shù)量、出現(xiàn)時(shí)刻、退出時(shí)刻、行動(dòng)路線等。 |
| 想定查詢與導(dǎo)入 |
提供查詢、導(dǎo)入想定功能。 |
| 快速編輯功能 |
提供快速方便的目標(biāo)復(fù)制、航線復(fù)制、目標(biāo)屬性編輯等功能。 |
3.4 信息采集
| 功能 |
描述 |
| 控制臺(tái)操作信息采集 |
控制臺(tái)的人機(jī)交互操作信息采集功能,由控制板負(fù)責(zé)采集、記錄并通過相應(yīng)接口傳到相應(yīng)的計(jì)算機(jī),并由該計(jì)算機(jī)上的模擬訓(xùn)練考核系統(tǒng)解析處理。 |
| 訓(xùn)練軟件操作信息采集 |
訓(xùn)練軟件上的人機(jī)交互操作信息采集功能,包括訓(xùn)練數(shù)據(jù)的采集、記錄、上傳,并上報(bào)給上級(jí)導(dǎo)控。 |
| 系統(tǒng)工作信息采集 |
采集系統(tǒng)初始工作狀態(tài)信息,及在訓(xùn)練過程中狀態(tài)發(fā)生變化的信息及時(shí)間。 |
3.5 狀態(tài)監(jiān)控
| 功能 |
描述 |
| 狀態(tài)監(jiān)控界面 |
建立狀態(tài)監(jiān)控界面,可顯示訓(xùn)練狀態(tài)。 |
| 訓(xùn)練狀態(tài)顯示 |
在監(jiān)控界面正確顯示訓(xùn)練狀態(tài)信息。 |
| 學(xué)員訓(xùn)練情況查看 |
導(dǎo)控端可以查看學(xué)員訓(xùn)練情況,如當(dāng)前步驟、無人機(jī)相關(guān)參數(shù)當(dāng)前狀態(tài)等。 |
3.6 訓(xùn)練評(píng)估
| 功能 |
描述 |
| 訓(xùn)練成果評(píng)分 |
導(dǎo)控端可以為學(xué)員訓(xùn)練成果進(jìn)行評(píng)分,評(píng)價(jià)標(biāo)準(zhǔn)涉及學(xué)員的操作流程和目標(biāo)偵察成果。 |
| 考核指標(biāo)制定 |
根據(jù)各訓(xùn)練課目訓(xùn)練內(nèi)容,制定課目考核指標(biāo)。 |
| 考核標(biāo)準(zhǔn)制定 |
根據(jù)制定的考核指標(biāo)制定考核標(biāo)準(zhǔn)。 |
| 訓(xùn)練進(jìn)度顯示 |
根據(jù)學(xué)員實(shí)時(shí)操作情況,顯示學(xué)員操作進(jìn)度。 |
| 訓(xùn)練效果評(píng)估 |
基于訓(xùn)練操作數(shù)據(jù)對(duì)每個(gè)學(xué)員進(jìn)行訓(xùn)練結(jié)果評(píng)估。 |
| 結(jié)果統(tǒng)計(jì)分析 |
根據(jù)評(píng)估結(jié)果對(duì)受訓(xùn)情況進(jìn)行統(tǒng)計(jì)與分析。 |
| 評(píng)估報(bào)告生成 |
生成并顯示訓(xùn)練評(píng)估報(bào)告。 |
4、訓(xùn)練端指標(biāo)
全系統(tǒng)含4套訓(xùn)練子系統(tǒng),每套訓(xùn)練子系統(tǒng)包括顯示器、VR頭顯設(shè)備、遙控手柄等,既包含地面操控終端的軟件、硬件操控功能,也包含飛機(jī)飛行狀態(tài)、任務(wù)載荷同步實(shí)時(shí)顯示以及多人對(duì)抗攻防演練功能;使用相應(yīng)的編程語言進(jìn)行編寫。
4.1 訓(xùn)練子系統(tǒng)硬件
| 功能 |
描述 |
| 半實(shí)物仿真模擬 |
按照放大比例半實(shí)物仿真模擬實(shí)裝無人機(jī)地面操控終端設(shè)備,為無人機(jī)地面操控終端軟件操作訓(xùn)練提供硬件支撐。 |
| 硬件和軟件控制 |
支持無人機(jī)地面操控終端軟件的硬件和軟件開啟與關(guān)閉、數(shù)據(jù)鏈開啟與關(guān)閉,符合實(shí)裝邏輯關(guān)系。 |
| 硬件位置一致性 |
無人機(jī)地面站模擬器硬件應(yīng)與實(shí)裝相對(duì)位置保持一致。 |
| 按鍵功能一致性 |
各硬件按鍵功能、觸感及操作與實(shí)裝基本保持一致。 |
4.2 訓(xùn)練子系統(tǒng)軟件
| 功能 |
描述 |
| 操作模擬軟件 |
可模擬實(shí)裝無人機(jī)操控終端軟件的各項(xiàng)功能界面切換,且與實(shí)裝操作軟件界面保持一致。 |
| 裝備操作流程仿真 |
具備裝備操作流程的仿真功能,操作過程、操作響應(yīng)與實(shí)裝操作軟件保持一致。 |
| 遙控、遙測數(shù)據(jù)模擬 |
獲取無人機(jī)上行遙控、下行遙測數(shù)據(jù),形成逼真的無人機(jī)仿真訓(xùn)練操作環(huán)境。 |
| 界面一致性 |
無人機(jī)操控終端軟件各分功能界面與實(shí)裝保持一致。 |
| 訓(xùn)練進(jìn)度監(jiān)控 |
訓(xùn)練子系統(tǒng)實(shí)時(shí)操作情況可由導(dǎo)控臺(tái)軟件讀取,以掌握學(xué)員訓(xùn)練進(jìn)度。 |
| 鏈路連通設(shè)置 |
導(dǎo)控臺(tái)可隨機(jī)設(shè)置訓(xùn)練子系統(tǒng)在完成鏈路連通后,連接飛機(jī)。 |
| 按鍵一致性 |
訓(xùn)練子系統(tǒng)按鍵與實(shí)裝基本保持一致,可以操控?zé)o人機(jī)起飛、降落和運(yùn)動(dòng),可以單擊或雙擊完成各界面切換,各按鍵的外形、相對(duì)位置以及操控觸感與實(shí)裝保持一致。 |
| 偵察數(shù)據(jù)存儲(chǔ) |
無人機(jī)偵察所獲取的目標(biāo)影像和圖像支持存放至本地文件夾內(nèi),目標(biāo)數(shù)據(jù)讀取流程與實(shí)裝保持一致,并可調(diào)取進(jìn)行情報(bào)處理,情報(bào)處理操作與實(shí)裝保持一致。 |
| 飛機(jī)狀態(tài)顯示 |
根據(jù)導(dǎo)控席設(shè)置,選擇連接飛機(jī),并且與相應(yīng)顯示欄顯示相應(yīng)飛機(jī)狀態(tài)。 |
| 信息匹配顯示 |
連接飛機(jī),其相應(yīng)信息能夠在偵察操控軟件飛行狀態(tài)參數(shù)欄、載荷信息欄、飛行數(shù)據(jù)、鏈路信息、載荷信息匹配顯示,并與屏幕中正在顯示的無人機(jī)飛行情況、載荷情況保持一致。 |
| 電源顯示 |
電源顯示應(yīng)隨著無人機(jī)飛行時(shí)間的增長不斷下降,當(dāng)達(dá)到預(yù)定電壓時(shí),無人機(jī)開啟相應(yīng)的應(yīng)急措施。 |
| 偵察圖像顯示 |
偵察圖像顯示界面與實(shí)裝保持一致,根據(jù)飛行距離以及與地面站的相對(duì)角度關(guān)系,畫面偶爾呈現(xiàn)模糊狀況。 |
| 系統(tǒng)退出 |
點(diǎn)擊系統(tǒng)退出,可以退出軟件界面。 |
| 情報(bào)處理界面 |
左下角顯示情報(bào)處理界面,可切換為主界面,進(jìn)行情報(bào)處理。 |
| 地圖窗口 |
右下角為地圖窗口,可切換為主界面,進(jìn)行任務(wù)航線規(guī)劃。 |
| 提交信息 |
學(xué)員完成操作以后可將所規(guī)劃的航線、所偵察到的目標(biāo)、所處理的目標(biāo)提交至導(dǎo)控席,提交的信息可以姓名進(jìn)行命名。 |
| 飛機(jī)位置調(diào)整 |
學(xué)員可以移動(dòng)飛機(jī)位置,選擇合適的起飛場地,地圖窗口內(nèi)的飛機(jī)位置也同步變化。 |
| 飛行模型建模 |
實(shí)現(xiàn)無人機(jī)飛行模型的建模和運(yùn)動(dòng)控制功能。 |
| 地面站操控界面 |
地面站操控界面和功能反饋與實(shí)裝一致。 |
| 戰(zhàn)術(shù)布置與對(duì)抗 |
學(xué)員可以利用訓(xùn)練終端進(jìn)行紅藍(lán)雙方無人機(jī)的戰(zhàn)術(shù)布置,模擬對(duì)抗場景,用戶可以在虛擬環(huán)境中進(jìn)行戰(zhàn)術(shù)規(guī)劃和實(shí)施。 |
| 偵察模擬 |
模擬各種無人機(jī)搭載的傳感器,如攝像頭、雷達(dá)、紅外探測器等,提供逼真的傳感器數(shù)據(jù)和圖像,使學(xué)員更好地理解無人機(jī)的偵察和探測能力。 |
| 攻擊模擬 |
模擬各種攻擊策略和手段,如突防、精確打擊等,學(xué)員可以根據(jù)對(duì)抗情況選擇合適的攻擊策略,提高攻擊方的打擊效果。 |
| 防御模擬 |
模擬各種防御策略和手段,如攔截、干擾、摧毀等,學(xué)員可以根據(jù)對(duì)抗情況選擇合適的防御策略,提高防御方的應(yīng)對(duì)能力。 |
(四)性能指標(biāo)
| 序號(hào) |
設(shè)備名稱 |
技術(shù)參數(shù) |
| 1 |
軟件功能 |
- 可設(shè)置的地理環(huán)境:≥3種。
- 可存儲(chǔ)不少于3種訓(xùn)練想定模板。
- 目標(biāo)數(shù)據(jù)庫包含步兵、工事障礙、外軍裝備等目標(biāo)類型,數(shù)量不少于20種。
- 典型訓(xùn)練想定擬制時(shí)間不大于10分鐘。
- 系統(tǒng)需要提供多樣化的任務(wù)類型,包括偵察、跟蹤、拍照、連拍、錄像等不少于5種功能。
|
| 2 |
訓(xùn)練席位 |
- 數(shù)量:1臺(tái)。
- CPU不低于Intel I5-10400,內(nèi)存不低于16G,固態(tài)硬盤容量不低于1T,獨(dú)立顯卡性能不低于GTX3060。
- 顯示器分辨率≥1920*1080,尺寸不小于24寸。
|
| 3 |
VR頭盔 |
- 數(shù)量:4臺(tái)。
- CPU:高通 XR2,Kryo 585 核心,8 核 64 位,最高主頻 2.84 GHz,7nm 制程工藝。
- 內(nèi)存:6 GB LPDDR4x,2133 MHz。
- 閃存:256GB,UFS 3.0。
|
| 4 |
導(dǎo)調(diào)席位 |
- 數(shù)量:≥1套。
- 計(jì)算機(jī)CPU不低于Intel I5-10400,內(nèi)存不低于16G,硬盤容量不低于1T,獨(dú)立顯卡性能不低于GTX3060。
- 顯示器分辨率≥1920*1080,尺寸不小于24寸。
|
| 5 |
教室交換機(jī) |
- 數(shù)量:≥1臺(tái)。
- 交換容量≥700Gbps,包轉(zhuǎn)發(fā)率≥400Mbps。
- 模塊雙電源、雙風(fēng)扇,配置≥24個(gè)以太網(wǎng)端口,1個(gè)萬兆光口。
|
KVB001B 型無人機(jī)模擬訓(xùn)練器介紹
一、主要功能
KVB001B 型無人機(jī)模擬訓(xùn)練系統(tǒng)支持該型無人機(jī)飛行準(zhǔn)備、飛行控制、任務(wù)控制、情報(bào)處理等崗位技能操作訓(xùn)練,可開展準(zhǔn)備飛行和任務(wù)等各階段協(xié)同訓(xùn)練、戰(zhàn)術(shù)訓(xùn)練。
二、系統(tǒng)組成
| 序號(hào) |
名稱 |
數(shù)量 |
備注 |
| 1 |
替代飛行設(shè)備 |
1 |
飛行保障設(shè)備含備用螺旋槳、加油機(jī)、充電器、電池、拆卸工具等 |
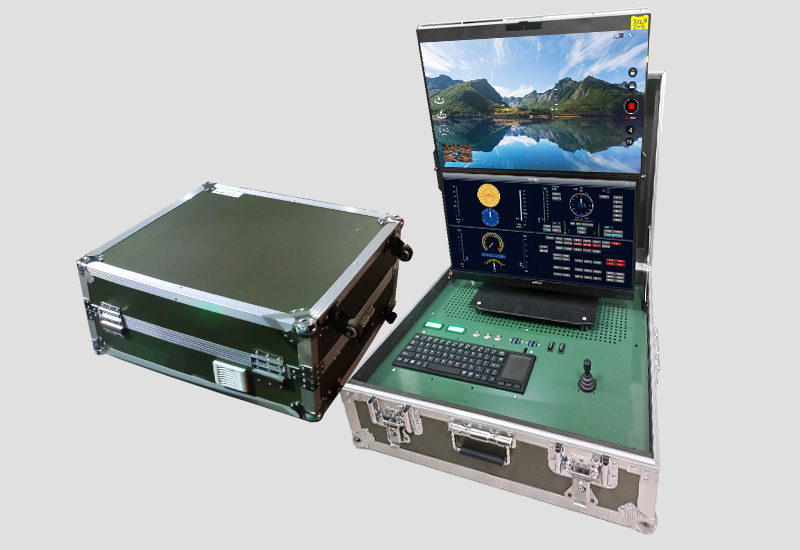
| 2 |
飛行控制終端(含鏈路控制) |
1 |
- 顯示與驅(qū)動(dòng)模塊
- 電源管理模塊
- 飛行控制計(jì)算機(jī)
- 飛行操縱模塊
- 便攜式控制機(jī)箱
|
| 3 |
任務(wù)控制終端 |
1 |
- 顯示與驅(qū)動(dòng)模塊
- 電源管理模塊
- 任務(wù)控制計(jì)算機(jī)
- 任務(wù)操縱模塊
- 便攜式控制機(jī)箱
|
| 4 |
情報(bào)處理終端 |
1 |
- 顯示與驅(qū)動(dòng)模塊
- 電源管理模塊
- 情報(bào)處理計(jì)算機(jī)
- 情報(bào)處理模塊
- 便攜式控制機(jī)箱
|
三、主要功能性能指標(biāo)
(一)主要功能指標(biāo)
| 序號(hào) |
分類 |
功能指標(biāo)名稱 |
指標(biāo)簡要說明 |
| 1 |
裝備操作訓(xùn)練 |
飛行前系統(tǒng)檢查 |
飛機(jī)加電檢測、控制邏輯等檢查。 |
| 2 |
裝備操作訓(xùn)練 |
發(fā)動(dòng)機(jī)檢查 |
發(fā)動(dòng)機(jī)狀態(tài)檢查,引擎啟動(dòng),控制邏輯檢查。 |
| 3 |
裝備操作訓(xùn)練 |
數(shù)據(jù)鏈設(shè)置 |
鏈路通道、頻點(diǎn)設(shè)置,功率設(shè)置,天線設(shè)置。 |
| 4 |
裝備操作訓(xùn)練 |
地圖操作 |
地圖漫游、縮放、比例尺切換。 |
| 5 |
裝備操作訓(xùn)練 |
任務(wù)規(guī)劃 |
巡航航線、回收航線、安全邊界繪制。 |
| 6 |
裝備操作訓(xùn)練 |
定點(diǎn)導(dǎo)航 |
8 字盤、圓順/逆盤、線段、跑道順/逆盤、蛇形。 |
| 7 |
裝備操作訓(xùn)練 |
地圖標(biāo)會(huì)操作 |
指定區(qū)域邊界繪制。 |
| 8 |
裝備操作訓(xùn)練 |
回收模型制作 |
模型調(diào)用、條件設(shè)置、航線生成。 |
| 9 |
裝備操作訓(xùn)練 |
任務(wù)設(shè)備控制 |
平臺(tái)狀態(tài)控制、工作模態(tài)控制。 |
| 10 |
裝備操作訓(xùn)練 |
視頻操作 |
凍結(jié)、釋放、亮度、增益、聚焦、變倍、畫面保存、鼠標(biāo)跟蹤。 |
| 11 |
裝備操作訓(xùn)練 |
照射引導(dǎo) |
參數(shù)設(shè)置、激光照射、能量解算、引導(dǎo)打擊。 |
| 12 |
裝備操作訓(xùn)練 |
目標(biāo)定位 |
目標(biāo)點(diǎn)選、坐標(biāo)輸出。 |
| 13 |
裝備操作訓(xùn)練 |
信息處理 |
圖像去霧、增強(qiáng)、負(fù)像、灰度、直方圖均衡。 |
| 14 |
裝備操作訓(xùn)練 |
情報(bào)處理 |
產(chǎn)品生成、情報(bào)分發(fā)。 |
| 15 |
專業(yè)協(xié)同訓(xùn)練 |
技術(shù)陣地準(zhǔn)備 |
拉距離、試車、鏈路載荷檢測。 |
| 16 |
專業(yè)協(xié)同訓(xùn)練 |
發(fā)射陣地準(zhǔn)備 |
陣地勘察、任務(wù)裝訂、遙控檢測。 |
| 17 |
專業(yè)協(xié)同訓(xùn)練 |
飛行控制協(xié)同 |
協(xié)同任務(wù)規(guī)劃、協(xié)同頻域規(guī)劃。 |
| 18 |
專業(yè)協(xié)同訓(xùn)練 |
飛控、任務(wù)協(xié)同 |
任務(wù)區(qū)飛行方法、協(xié)同用語、協(xié)同偵察。 |
| 19 |
戰(zhàn)術(shù)訓(xùn)練 |
戰(zhàn)場偵察 |
目標(biāo)設(shè)置、固定目標(biāo)偵察、移動(dòng)目標(biāo)偵察。 |
| 20 |
戰(zhàn)術(shù)訓(xùn)練 |
定位校射 |
目標(biāo)識(shí)別定位、炸點(diǎn)添加、偏差量解算。 |
| 21 |
戰(zhàn)術(shù)訓(xùn)練 |
目標(biāo)判讀 |
目標(biāo)識(shí)別、圖像比對(duì)、分析評(píng)估。 |
(二)主要性能指標(biāo)
| 序號(hào) |
分類 |
功能指標(biāo)名稱 |
指標(biāo)簡要說明 |
| 1 |
主要通用性能指標(biāo) |
便攜式設(shè)計(jì) |
各組成部分便于單兵攜行。 |
| 2 |
主要通用性能指標(biāo) |
模擬訓(xùn)練系統(tǒng)軟硬件界面 |
按照 KVB001B 型無人機(jī)裝備進(jìn)行模擬。 |
| 3 |
主要通用性能指標(biāo) |
安全性 |
- 電源有明顯的通斷指示、操作簡便、能及時(shí)切斷電源。
- 電源輸入有保護(hù)措施。
- 接插件、印制板和支架有防插錯(cuò)、防反插保護(hù)裝置。
- 人機(jī)交互硬件部分有防護(hù)措施。
|
| 4 |
主要通用性能指標(biāo) |
環(huán)境適應(yīng)性 |
工作溫度:0℃-40℃。 |
| 5 |
主要通用性能指標(biāo) |
供電及功耗 |
- 控制終端供電:市電交流 220V/50Hz,功耗≤1kW。
- 機(jī)上設(shè)備供電:直流 12V,功耗≤10W。
|
| 6 |
特殊性能指標(biāo) |
仿真飛行環(huán)境 |
- 仿真飛行環(huán)境與二維地圖匹配,區(qū)域可選≥3 種(包括高原、平原、山地等地形環(huán)境),支持視點(diǎn)遠(yuǎn)近、上下、旋轉(zhuǎn)連續(xù)切換。
- 仿真飛行單個(gè)區(qū)域面積:≥3000 平方千米。
- 地形匹配精度水平優(yōu)于 5 米,高程優(yōu)于 30 米。
- 地形支持固定、運(yùn)動(dòng)目標(biāo)添加,固定目標(biāo)種類:≥10 種,運(yùn)動(dòng)目標(biāo):≥5 種。
- 仿真飛行環(huán)境加載時(shí)間:≤1 分鐘。
|
| 7 |
特殊性能指標(biāo) |
控制終端 |
- 單個(gè)控制終端具有便攜提手和可收納支架。
- 控制終端外觀顏色:軍綠色。
- 控制終端強(qiáng)度:承重≥50 公斤。
- 控制終端支持外供電和電池供電自動(dòng)切換,電池供電續(xù)航時(shí)間≥2.0 小時(shí)。
- 控制終端具有網(wǎng)口、USB 接口。
- 控制終端支持多屏切換投影。
- 單個(gè)控制終端支持雙屏顯示,分辨率優(yōu)于 1920×1080。
- 控制終端主機(jī)配置:處理器 Intel I7 以上(含 I7),內(nèi)存≥16GB,固態(tài)硬盤容量≥512GB。
|
固定翼無人機(jī)模擬訓(xùn)練系統(tǒng)
1. 系統(tǒng)組成
| 組件 |
描述 |
| 半實(shí)物訓(xùn)練設(shè)備 |
便攜式訓(xùn)練終端1臺(tái)、連接線纜1套。 |
| 訓(xùn)練計(jì)算機(jī)集群 |
高性能計(jì)算機(jī)1臺(tái),連接線纜若干。 |
| 飛行仿真軟件 |
安裝于高性能仿真計(jì)算機(jī),用于無人機(jī)飛行仿真。 |
| 視景仿真軟件 |
安裝于高性能仿真計(jì)算機(jī),用于建立戰(zhàn)場仿真環(huán)境、任務(wù)載荷仿真、數(shù)據(jù)鏈設(shè)備仿真。 |
| 教學(xué)管理軟件 |
安裝于高性能管理計(jì)算機(jī),用于訓(xùn)練評(píng)估、狀態(tài)監(jiān)控、組網(wǎng)訓(xùn)練管理等。 |
2. 學(xué)員訓(xùn)練席功能
| 功能 |
描述 |
| 初始化設(shè)置操作過程模型 |
- 顯示設(shè)置
- 參數(shù)設(shè)置
- 數(shù)據(jù)管理
- 應(yīng)急處置設(shè)置
|
| 任務(wù)規(guī)劃操作過程模型 |
|
| 飛行前檢查操作過程模型 |
- 系統(tǒng)參數(shù)檢查
- 飛行器性能檢查
- 飛控性能檢查
- 載荷性能檢查
|
| 飛行操縱操作過程模型 |
- 飛行監(jiān)控及偵察監(jiān)視
- 回收降落
|
| 目標(biāo)偵察操作過程模型 |
目標(biāo)偵察。 |
| 應(yīng)急情況處置操作過程模型 |
|
3. 教學(xué)管理席功能
| 功能 |
描述 |
| 訓(xùn)練科目設(shè)置 |
設(shè)置訓(xùn)練科目和內(nèi)容。 |
| 訓(xùn)練狀態(tài)監(jiān)控 |
實(shí)時(shí)監(jiān)控學(xué)員訓(xùn)練狀態(tài)。 |
| 訓(xùn)練評(píng)估與交互控制 |
對(duì)學(xué)員訓(xùn)練成果進(jìn)行評(píng)估,并提供交互控制功能。 |
4. 裝備數(shù)字化模型
| 功能 |
描述 |
| 氣動(dòng)、飛控仿真模擬 |
具備對(duì)XX6A型超近程無人偵察機(jī)氣動(dòng)、飛控的仿真模擬能力。 |
| 特情處理仿真 |
具備對(duì)XX6A型超近程無人偵察機(jī)特情處理仿真能力。 |
| 載荷仿真 |
具備對(duì)XX6A型超近程無人偵察機(jī)可見光載荷、紅外載荷的平臺(tái)運(yùn)動(dòng)、圖像成像及激光仿真能力。 |
| 視頻編解碼與傳輸 |
具備XX6A型超近程無人偵察機(jī)載荷仿真視頻圖像的編解碼和實(shí)時(shí)網(wǎng)絡(luò)傳輸能力。 |
| 擴(kuò)展模型支持 |
支持?jǐn)U展XX7A四旋翼無人偵察機(jī)、XXX211單兵巡飛彈數(shù)字化模型。 |
5. 三維仿真環(huán)境
| 功能 |
描述 |
| 三維場景構(gòu)建 |
基于真實(shí)DEM數(shù)據(jù)和衛(wèi)星影像數(shù)據(jù)構(gòu)建目標(biāo)地區(qū)三維場景。 |
| 氣象條件模擬 |
支持實(shí)時(shí)三維視景渲染,具備氣象條件模擬能力。 |
6. 目標(biāo)生成模塊
| 功能 |
描述 |
| 目標(biāo)生成、編輯與管理 |
具備目標(biāo)生成、編輯與管理功能。 |
| 動(dòng)目標(biāo)路徑跟蹤 |
具備動(dòng)目標(biāo)路徑跟蹤、運(yùn)動(dòng)學(xué)模擬功能。 |
7. 訓(xùn)練任務(wù)仿真
| 功能 |
描述 |
| 半實(shí)物訓(xùn)練能力 |
具備對(duì)XX6A型超近程無人偵察機(jī)半實(shí)物訓(xùn)練能力。 |
| 全流程管理和數(shù)據(jù)分析 |
具備訓(xùn)練任務(wù)全流程管理和數(shù)據(jù)分析功能,具有任務(wù)制定、訓(xùn)練實(shí)施、訓(xùn)練過程監(jiān)控、訓(xùn)練效果評(píng)估等功能。 |
| 理論學(xué)習(xí)與訓(xùn)練 |
具備專業(yè)理論學(xué)習(xí)、飛行仿真訓(xùn)練、維修訓(xùn)練、考核評(píng)估等功能。 |
| 全流程仿真訓(xùn)練 |
具備基于典型作戰(zhàn)任務(wù)的全流程仿真訓(xùn)練能力,可對(duì)預(yù)定目標(biāo)實(shí)施偵察定位、跟蹤監(jiān)視、圖像拍攝和錄像等功能。 |
8. 總體指標(biāo)
| 指標(biāo) |
描述 |
| 系統(tǒng)刷新率 |
≥25Fps。 |
| 圖像傳輸延時(shí)時(shí)間 |
≤500ms。 |
| 連續(xù)訓(xùn)練時(shí)間 |
≥8h。 |
9. 訓(xùn)練環(huán)境資源
| 功能 |
描述 |
| 仿真區(qū)域和大小 |
≥30km×30km,具有目標(biāo)區(qū)域電子地圖和三維立體視景,包括城鎮(zhèn)、山地、荒漠等典型場景。 |
| 天氣和時(shí)間特效 |
可模擬云、雨、霧、晝夜等天氣和時(shí)間特效。 |
10. 模型指標(biāo)
| 功能 |
描述 |
| 三維模型格式 |
支持FBX/OBJ三維模型格式。 |
| 紋理支持 |
紋理支持多種主流圖片格式(如png、jpg等)。 |
11. 目標(biāo)生成模塊指標(biāo)
| 功能 |
描述 |
| 地面目標(biāo)生成 |
支持地面車輛、人員等動(dòng)目標(biāo)生成。 |
12. 多用戶并發(fā)指標(biāo)
| 功能 |
描述 |
| 分布式仿真節(jié)點(diǎn) |
≥10個(gè)。 |
| 多用戶延時(shí) |
≤500ms。 |
13. 半實(shí)物訓(xùn)練設(shè)備
| 功能 |
描述 |
| 外觀布局與結(jié)構(gòu) |
便攜式訓(xùn)練終端外觀布局、結(jié)構(gòu)、尺寸、按鍵搖桿、操作面板、顏色等與XX6A型超近程無人偵察機(jī)實(shí)裝便攜式訓(xùn)練終端保持一致。 |
| 軟件界面與操作邏輯 |
便攜式訓(xùn)練終端軟件與XX6A便攜式訓(xùn)練終端軟件界面、操作邏輯、數(shù)據(jù)格式等保持一致。 |
| 擴(kuò)展模型支持 |
便攜式訓(xùn)練終端可通過軟件升級(jí)實(shí)現(xiàn)對(duì)XX7A四旋翼無人偵察機(jī)、XXX211單兵巡飛彈的仿真訓(xùn)練。 |
14. 高性能工作站
| 功能 |
描述 |
| 處理器 |
主頻不低于2.4GHz;不低于8核。 |
| 內(nèi)存 |
不低于16GB。 |