模擬戰(zhàn)場(chǎng)駕駛,鑄就實(shí)戰(zhàn)精兵
開啟現(xiàn)代化軍事訓(xùn)練新時(shí)代
多維度技能訓(xùn)練,鍛造戰(zhàn)場(chǎng)駕馭能力





多場(chǎng)景駕駛模擬
駕駛訓(xùn)練全覆蓋,全方位訓(xùn)練提升




科技驅(qū)動(dòng)駕駛訓(xùn)練,創(chuàng)新鑄就強(qiáng)軍之路
前沿科技應(yīng)用,革新傳統(tǒng)訓(xùn)練模式,實(shí)現(xiàn)強(qiáng)軍目標(biāo)
駕駛模擬訓(xùn)練系統(tǒng)產(chǎn)品形態(tài)

無(wú)自由度模擬/遠(yuǎn)程駕駛臺(tái)
高度還原真實(shí)駕駛操作模擬駕駛臺(tái)主要用于模擬駕駛操作,適用駕駛教學(xué);遠(yuǎn)程駕駛臺(tái)通過(guò)網(wǎng)絡(luò)實(shí)現(xiàn)對(duì)遠(yuǎn)端車輛的實(shí)時(shí)操控。
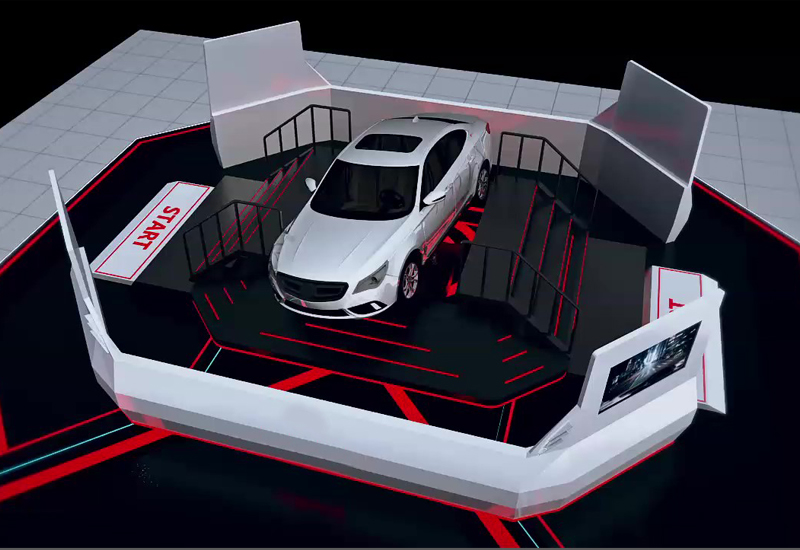
三自由度/六自由度模擬駕駛臺(tái)
全面運(yùn)動(dòng)模擬 真實(shí)動(dòng)態(tài)變化全方位運(yùn)動(dòng)模擬,顯著提升駕駛訓(xùn)練的沉浸感。適合高級(jí)駕駛訓(xùn)練,如特種車輛駕駛、復(fù)雜地形駕駛和應(yīng)急處置訓(xùn)練。
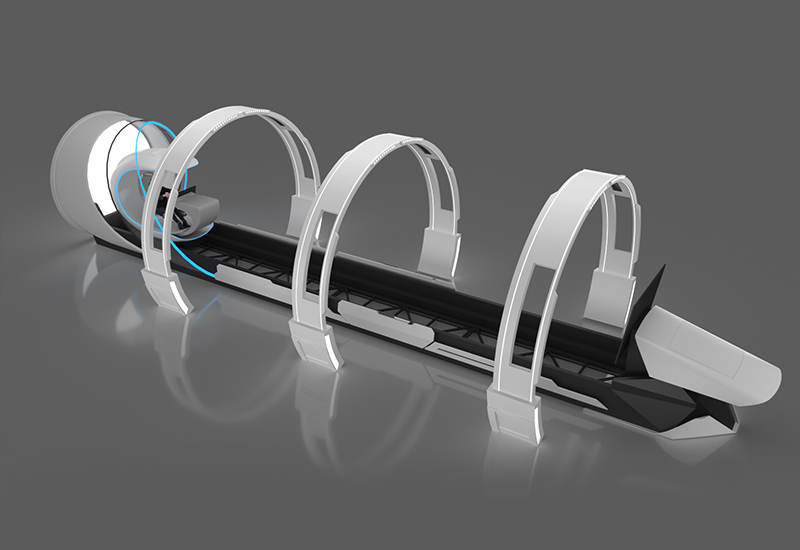
三自由度+滑軌駕駛臺(tái)
多種大型車輛1:1還原該系統(tǒng)支持多種復(fù)雜特種車輛駕駛場(chǎng)景,包括重型運(yùn)輸車、裝甲車和工程車輛等。系統(tǒng)涵蓋豐富車型、完整訓(xùn)練課目、多樣地形,訓(xùn)練地形高度仿真,高度還原特種車輛在復(fù)雜路況和戰(zhàn)場(chǎng)環(huán)境中的動(dòng)態(tài)表現(xiàn)。
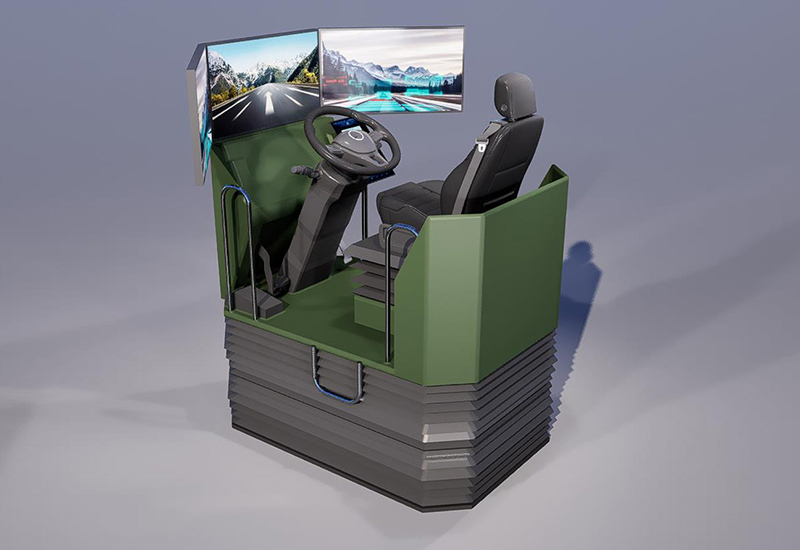
六自由度+真車座艙駕駛臺(tái)
基礎(chǔ)駕駛,被動(dòng)引導(dǎo)專為初學(xué)者和基礎(chǔ)駕駛訓(xùn)練設(shè)計(jì)的設(shè)備,采用被動(dòng)式汽車駕駛模擬座艙,提供安全、高效的駕駛訓(xùn)練體驗(yàn)。該系統(tǒng)通過(guò)語(yǔ)音提示和操作引導(dǎo),幫助訓(xùn)練者學(xué)習(xí)正確的駕駛操作順序,掌握基本駕駛技能。
系統(tǒng)概述
三自由度/六自由度功能對(duì)比
| 功能/特點(diǎn) | 三自由度模擬駕駛臺(tái) | 六自由度模擬駕駛臺(tái) |
|---|---|---|
| 運(yùn)動(dòng)自由度 | 俯仰、側(cè)傾、升降 | 滾動(dòng)、俯仰、偏航、縱向位移、橫向位移、垂向位移 |
| 運(yùn)動(dòng)范圍 | 有限的垂直和水平運(yùn)動(dòng) | 全方位運(yùn)動(dòng),模擬復(fù)雜動(dòng)態(tài)變化 |
| 成本 | 較低,適合預(yù)算有限的場(chǎng)景 | 較高,適合對(duì)模擬效果要求高的場(chǎng)景 |
| 空間需求 | 空間占用小 | 空間占用較大 |
| 沉浸感 | 提供基礎(chǔ)的動(dòng)態(tài)反饋 | 高度沉浸,模擬真實(shí)駕駛體驗(yàn) |
| 適用場(chǎng)景 | 基礎(chǔ)駕駛訓(xùn)練、理論學(xué)習(xí) | 高級(jí)駕駛訓(xùn)練、復(fù)雜地形駕駛、應(yīng)急避險(xiǎn)訓(xùn)練 |
| 維護(hù)難度 | 維護(hù)簡(jiǎn)單 | 維護(hù)復(fù)雜,專業(yè)性更強(qiáng) |
駕駛模擬訓(xùn)練系統(tǒng)
 部隊(duì)駕駛模擬訓(xùn)練系統(tǒng)是一種高度集成化的現(xiàn)代化軍事訓(xùn)練設(shè)備,旨在通過(guò)虛擬仿真技術(shù)為部隊(duì)駕駛員提供一個(gè)高度逼真、安全且高效的駕駛訓(xùn)練環(huán)境,以提升其駕駛技能和應(yīng)對(duì)復(fù)雜戰(zhàn)場(chǎng)環(huán)境的能力。
系統(tǒng)能夠模擬各種地形、天氣和戰(zhàn)場(chǎng)條件,如山地、沙漠、城市等,以及不同天氣和光照情況,幫助駕駛員適應(yīng)復(fù)雜環(huán)境;支持坦克、裝甲車、卡車等多種軍用車輛的模擬訓(xùn)練,滿足不同兵種需求;配備與真實(shí)車輛一致的操作裝置,如方向盤、踏板、儀表盤等,提供真實(shí)的操作體驗(yàn)。系統(tǒng)能夠?qū)崟r(shí)監(jiān)控駕駛員操作,提供反饋和評(píng)估,幫助改進(jìn)駕駛技能和戰(zhàn)術(shù)應(yīng)用。系統(tǒng)能夠記錄訓(xùn)練數(shù)據(jù),便于后期分析,優(yōu)化訓(xùn)練方案。能夠支持多臺(tái)模擬器聯(lián)網(wǎng),進(jìn)行車隊(duì)協(xié)同、戰(zhàn)術(shù)配合等訓(xùn)練,提升團(tuán)隊(duì)協(xié)作能力。
部隊(duì)駕駛模擬訓(xùn)練系統(tǒng)是一種高度集成化的現(xiàn)代化軍事訓(xùn)練設(shè)備,旨在通過(guò)虛擬仿真技術(shù)為部隊(duì)駕駛員提供一個(gè)高度逼真、安全且高效的駕駛訓(xùn)練環(huán)境,以提升其駕駛技能和應(yīng)對(duì)復(fù)雜戰(zhàn)場(chǎng)環(huán)境的能力。
系統(tǒng)能夠模擬各種地形、天氣和戰(zhàn)場(chǎng)條件,如山地、沙漠、城市等,以及不同天氣和光照情況,幫助駕駛員適應(yīng)復(fù)雜環(huán)境;支持坦克、裝甲車、卡車等多種軍用車輛的模擬訓(xùn)練,滿足不同兵種需求;配備與真實(shí)車輛一致的操作裝置,如方向盤、踏板、儀表盤等,提供真實(shí)的操作體驗(yàn)。系統(tǒng)能夠?qū)崟r(shí)監(jiān)控駕駛員操作,提供反饋和評(píng)估,幫助改進(jìn)駕駛技能和戰(zhàn)術(shù)應(yīng)用。系統(tǒng)能夠記錄訓(xùn)練數(shù)據(jù),便于后期分析,優(yōu)化訓(xùn)練方案。能夠支持多臺(tái)模擬器聯(lián)網(wǎng),進(jìn)行車隊(duì)協(xié)同、戰(zhàn)術(shù)配合等訓(xùn)練,提升團(tuán)隊(duì)協(xié)作能力。
駕駛模擬訓(xùn)練器技術(shù)參數(shù)
| 一、軟件系統(tǒng) | ||
|---|---|---|
| 1. 駕駛軟件功能(支持VR/平面切換) | ||
| (1)理論知識(shí) | 科目一、科目四題庫(kù)管理,支持題目添加 | |
| (2)場(chǎng)地駕駛 | 直角轉(zhuǎn)彎|S形路|側(cè)方停車(左/右)|倒車入庫(kù)|坡道起步|上坡轉(zhuǎn)彎換擋 單凸路|橫斷路|單邊橋|雙邊橋|高架橋|圓形錯(cuò)位障礙|錯(cuò)位小巷 限制門|綜合技能駕駛|組合限制路段 |
|
| (3)道路駕駛 | 一般道路|城市道路|高速道路|山區(qū)道路|鄉(xiāng)村道路|戈壁沙漠 草原荒漠|高原道路|達(dá)坂路 |
|
| (4)復(fù)雜路段 | 泥濘路段|涉水路段|松沙路段|亂石路段|冰雪路段 | |
| (5)戰(zhàn)地駕駛 | 進(jìn)出掩體|山丘|側(cè)坡|蛇形障礙|燃燒路段|反坦克壕|塹壕 彈坑|浮橋|戰(zhàn)地組合障礙 |
|
| (6)特殊天候 | 夜間|雨天|霧天|雪天|風(fēng)沙天候 | |
| (7)運(yùn)輸工具 | 鐵路平車|艦船|運(yùn)輸機(jī) | |
| (8)應(yīng)急避險(xiǎn) | 保胎|轉(zhuǎn)向失靈|制動(dòng)失靈|熄火|車輛失火|突遇飛石 | |
| (9)車輛防護(hù) | 隱蔽偽裝|核沾染區(qū)|生化襲擊地段 | |
| (10)車型/天氣 |
支持車型: 皮卡/北汽勇士/解放系列/東風(fēng)系列/陜汽/豪沃/長(zhǎng)城/江鈴等38種軍用車型 天氣系統(tǒng): 晴/陰/雨/雪/霧/夜/風(fēng)沙/雷暴/霜凍/霾/冰雹/熱浪/寒潮等16種天候 |
|
| 2. 聯(lián)網(wǎng)考核功能 | ||
| (1)用戶管理 |
? 用戶類型:管理員/教員/學(xué)員 ? 操作功能:查看/刪除/編輯/注冊(cè) ? 數(shù)據(jù)交互:Excel導(dǎo)入導(dǎo)出 ? 查詢功能:支持多條件檢索 |
|
| (2)設(shè)備管理 |
? 狀態(tài)管理:停用/脫機(jī)/聯(lián)機(jī) ? 設(shè)備編號(hào):順序注冊(cè)/指定編號(hào) ? 可視化布局:可拖拽圖標(biāo)定位 ? 注冊(cè)機(jī)制:客戶端小程序雙向通信 |
|
| (3)模板系統(tǒng) |
? 訓(xùn)練模式:?jiǎn)诬嚳己?分隊(duì)編組 ? 科目配置:XML結(jié)構(gòu)化數(shù)據(jù)表 ? 環(huán)境組合:天氣/時(shí)間/戰(zhàn)場(chǎng)/交通 ? 約束規(guī)則:天候與地形匹配機(jī)制 |
|
| (4)模擬考試 |
? 狀態(tài)控制:準(zhǔn)備/開始/完成三態(tài) ? 時(shí)間管理:自動(dòng)計(jì)時(shí)/強(qiáng)制提交 ? 監(jiān)控系統(tǒng):雙視角/地圖軌跡 ? 干預(yù)功能:動(dòng)態(tài)加載/實(shí)時(shí)糾錯(cuò) |
|
| (5)編隊(duì)訓(xùn)練 |
? 房間機(jī)制:導(dǎo)控臺(tái)主動(dòng)分配 ? 實(shí)時(shí)顯示:狀態(tài)/地圖/監(jiān)控 ? 動(dòng)態(tài)調(diào)整:駕駛參數(shù)即時(shí)修改 |
|
| (6)數(shù)據(jù)管理 |
? 存儲(chǔ)方式:數(shù)據(jù)庫(kù)+視頻存檔 ? 分析功能:60分鐘/100條記錄 ? 回放系統(tǒng):多視角/進(jìn)度控制 ? 導(dǎo)出格式:Excel/PDF/文本 |
|
| (7)成績(jī)系統(tǒng) |
? 多維查詢:時(shí)間/科目/班級(jí) ? 詳情報(bào)告:車型/天候/戰(zhàn)場(chǎng)環(huán)境 ? 批量操作:刪除/導(dǎo)出/打印 |
|
硬件設(shè)備規(guī)格表
| 類別 | 項(xiàng)目 | 規(guī)格 |
|---|---|---|
| 模擬駕駛艙 | 座艙尺寸 | 長(zhǎng)×寬×高:≤2300×1200×1900(mm),重量:≤500kg |
| 材質(zhì) | 整體框架采用高強(qiáng)度鈑金組裝,外殼使用優(yōu)質(zhì)玻璃鋼材質(zhì) | |
| 座椅 | 真車座椅,可調(diào)節(jié)座椅前后及靠背斜度。座椅安全帶配置開關(guān)感應(yīng)裝置,自動(dòng)提醒安全帶佩戴狀態(tài) | |
| 轉(zhuǎn)向系統(tǒng) | 方向盤采用實(shí)車配件,內(nèi)部轉(zhuǎn)向機(jī)構(gòu)高強(qiáng)度抗疲勞扭簧、齒輪、同步輪,力反饋效果,力感同實(shí)車,可自動(dòng)回位 | |
| 離合器踏板 | 離合器踏板總行程應(yīng)在50mm~120mm范圍內(nèi),踏板力應(yīng)在20N~150N范圍內(nèi) | |
| 制動(dòng)踏板 | 制動(dòng)踏板最大行程在50mm~135mm范圍內(nèi),制動(dòng)踏板力應(yīng)小于等于100~500N | |
| 駐車制動(dòng)器操縱桿 | 駐車制動(dòng)桿拉力應(yīng)在 20N~100N范圍內(nèi) | |
| 加速踏板 | 加速踏板總行程在50mm~l00mm范圍內(nèi),踏板力應(yīng)在20N~100N范圍內(nèi) | |
| 變速器操縱桿 | 變速器操縱桿根據(jù)檔位類別標(biāo)示檔位,變速器操縱桿操縱力應(yīng)在 10N~50N范圍內(nèi) | |
| 儀表 | 采用實(shí)車儀表,模擬訓(xùn)練時(shí)儀表能真實(shí)顯示實(shí)時(shí)駕駛時(shí)速 | |
| 組合開關(guān) | 主要功能:左轉(zhuǎn)向燈、右轉(zhuǎn)向燈、遠(yuǎn)光燈、近光燈、快慢雨刷、應(yīng)急燈、喇叭、點(diǎn)火開關(guān)、霧燈等 | |
| 操控臺(tái) | 具有應(yīng)急開關(guān)、喇叭按鈕、燈光開關(guān)等,內(nèi)含小鍵盤等功能按鍵 | |
| 計(jì)算機(jī) | 內(nèi)存:≥16G 處理器:四核八線程以上,主頻≥2.0GHZ 硬盤:≥2T 顯卡:獨(dú)立顯卡≥2G 轉(zhuǎn)速≥7200 | |
| 動(dòng)感平臺(tái) | 組成 | 有效載荷重量≥600kg;總載荷:≥800kg(含上平臺(tái)及鉸鏈) |
| 運(yùn)動(dòng)能力指標(biāo) |
自由度 位移或角度 速度 加速度 重復(fù)精度 定位精度 俯仰 ±12° 50°/s ±100°/s2 0.05° 0.01° 側(cè)傾 ±11° 50°/s ±100°/s2 0.1mm 0.05mm 升幅 0-130mm 166mm/s 0.3g 0.1mm 0.05mm |
|
| 功能要求 | 模擬汽車在駕駛過(guò)程中的姿態(tài)變化,能夠模擬上下、側(cè)傾、俯仰等姿態(tài) | |
| 綜合控制監(jiān)測(cè)系統(tǒng) | 硬件為用戶計(jì)算機(jī),軟件為研制方配合開發(fā);平臺(tái)啟動(dòng)時(shí)自動(dòng)對(duì)主要部件進(jìn)行檢測(cè),發(fā)現(xiàn)故障時(shí)通過(guò)屏幕或者聲音報(bào)警,經(jīng)處置后方可運(yùn)行。在系統(tǒng)運(yùn)行時(shí)實(shí)時(shí)檢測(cè),當(dāng)檢測(cè)到故障時(shí)自動(dòng)切入安全保護(hù)模式。系統(tǒng)具有過(guò)載保護(hù)、過(guò)流保護(hù)、過(guò)壓保護(hù)和短路保護(hù) | |
| 產(chǎn)品標(biāo)準(zhǔn) | 嚴(yán)格按照J(rèn)T/T-378-2014行業(yè)標(biāo)準(zhǔn)研發(fā)生產(chǎn),符合駕校配置機(jī)動(dòng)車駕駛模擬器設(shè)備標(biāo)準(zhǔn) | |
| 環(huán)境條件 |
1)運(yùn)行環(huán)境溫度:0-+40°C 環(huán)境下安全運(yùn)行; 2)儲(chǔ)存溫度:-10°C~+50°C; 3)濕度:≤90%RH(不結(jié)露) |
|
| 可靠性和可維修性 | 模擬器一次連續(xù)工作時(shí)間不低于24小時(shí) | |
| 視景仿真平臺(tái) | 顯示屏 | 液晶顯示器:≥49寸,超寬帶魚全面屏32:9,分辨率3840*1080 |
| VR沉浸式體驗(yàn)裝置 | 高清VR頭盔,沉浸式VR駕駛軟件系統(tǒng) | |
| 聯(lián)網(wǎng)考核控制臺(tái) | 控制臺(tái)臺(tái)體 |
1)臺(tái)面:鈑金+防靜電噴塑,具有耐磨、耐高溫、耐刮、抗?jié)B透、容易清潔、防潮、不褪色、觸感細(xì)膩等特點(diǎn),可選顏色種類多。 2)主體框架、前后門:優(yōu)質(zhì)冷軋鋼板1.5-3.0mm厚材料制作,表面靜電噴涂,零甲醛,零氣味。 3)綜合布線:矩形框架,堅(jiān)固耐用,強(qiáng)電弱電分離線槽,內(nèi)部橫縱向強(qiáng)電弱電分開便于走線,方便捆扎, 科學(xué)安全管理。 4)側(cè)板和臺(tái)面板材、顏色匹配。配件采用活動(dòng)托盤、活動(dòng)鍵盤托。 5)屏風(fēng)背板墻精選優(yōu)質(zhì)冷軋板制作,可掛單屏、雙屏、多屏液晶支架,尺寸長(zhǎng)約1500mm,寬約900mm,高約1100mm。用于存放教員用計(jì)算機(jī)、服務(wù)器、音響等。 |
| 顯示器 | 高清液晶顯示器尺寸≥27寸,分辨率2560*1440 | |
| 主控機(jī) | 計(jì)算機(jī),內(nèi)存:≥16G 處理器:四核八線程以上,主頻≥2.0GHZ 硬盤:≥2T 顯卡:獨(dú)立顯卡≥2G 轉(zhuǎn)速≥7200 | |
| 打印機(jī) | A4激光打印機(jī),國(guó)產(chǎn)品牌,打印速度≥28頁(yè)/分鐘,有線連線;打印分辨率≥600*600dpi | |
| 交換機(jī) | 不低于16個(gè) 10/100/1000Base-T;不少于4個(gè)1000Base-XSFP。支持RPS冗余電源。包轉(zhuǎn)發(fā)率:不低于78Mpps;交換容量:不低于256Gbps | |
| 配套設(shè)施 | 主要包括電源線布設(shè)、信號(hào)傳輸線材(網(wǎng)線、光纖等)布設(shè)等相關(guān)配套設(shè)施 |
北京某部駕駛模擬器技術(shù)參數(shù)
硬件組成
| 硬件設(shè)備 | 功能描述 |
|---|---|
| VR頭顯設(shè)備 |
|
| 三自由度駕駛訓(xùn)練模擬器 |
|
| 六自由度駕駛訓(xùn)練模擬器 |
|
軟件組成
| 模塊 | 功能 | 詳細(xì)描述 |
|---|---|---|
| 導(dǎo)調(diào)及綜合管理 | 任務(wù)下發(fā) | 組訓(xùn)人員能夠根據(jù)需要對(duì)學(xué)兵下發(fā)不同的訓(xùn)練指令,如“張三作為班組組長(zhǎng)開始進(jìn)行班組行車訓(xùn)練任務(wù)”等。 |
| 任務(wù)管理 | 組訓(xùn)人員能夠?qū)W(xué)兵的訓(xùn)練考核課目進(jìn)行增加、刪減和修改等操作,并實(shí)時(shí)控制訓(xùn)練過(guò)程。 | |
| 系統(tǒng)加載 | 根據(jù)設(shè)置的任務(wù),配置初始化參數(shù)并發(fā)送給各學(xué)兵,初始化數(shù)據(jù)包括訓(xùn)練戰(zhàn)地的自然環(huán)境、作戰(zhàn)單元的地理位置等。 | |
| 環(huán)境設(shè)置 | 組訓(xùn)人員能夠?qū)τ?xùn)練場(chǎng)景和內(nèi)容進(jìn)行個(gè)性化定制,修改訓(xùn)練場(chǎng)景、天氣、路徑、時(shí)間和計(jì)劃等。 | |
| 教員訓(xùn)練進(jìn)程控制 | 實(shí)時(shí)監(jiān)控學(xué)兵訓(xùn)練過(guò)程,具備錄制、成績(jī)?cè)u(píng)定、投屏展示、二三維呈現(xiàn)、排名展示等功能。 | |
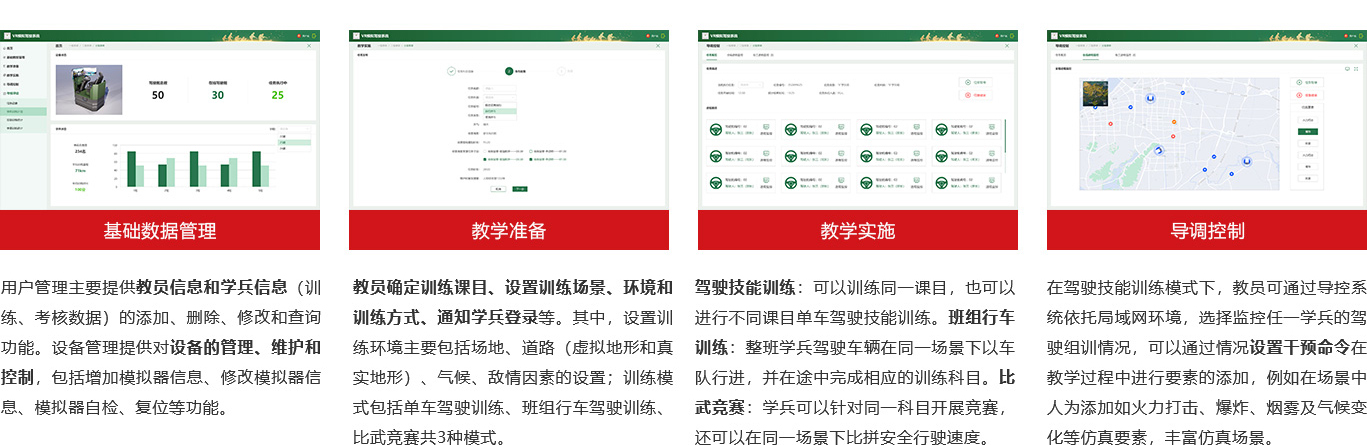
| 平臺(tái)框架建設(shè) | 教員應(yīng)用功能 | 包括基礎(chǔ)數(shù)據(jù)管理、教學(xué)準(zhǔn)備、教學(xué)實(shí)施、導(dǎo)調(diào)控制、考核評(píng)估、復(fù)盤回放六部分功能。 |
| 學(xué)兵應(yīng)用功能 | 學(xué)兵在教員完成教學(xué)準(zhǔn)備后開展訓(xùn)練,分為駕駛技能訓(xùn)練、班組行車訓(xùn)練、比武競(jìng)賽。 | |
| 訓(xùn)練考核評(píng)估功能 | 依據(jù)訓(xùn)練大綱確定考核標(biāo)準(zhǔn),具備成績(jī)存儲(chǔ)、查詢、分析等功能。 | |
| 自檢功能 | 各傳感器、機(jī)件具備自檢功能,形成常見(jiàn)故障現(xiàn)象、代碼及解決表。 | |
| 模擬駕駛訓(xùn)練功能 | 模擬器基本要求 | 駕駛操作部件與實(shí)裝功能一致,具備三(六)自由度平臺(tái)、儀表模擬、汽車動(dòng)力學(xué)模型等。 |
| 訓(xùn)練課目庫(kù) | 包括解放CA1125J、泰安TA4360帶半掛、BJ80指揮車、安凱大客車等車型的訓(xùn)練課目。 | |
| 考核評(píng)估功能 | 主體模塊 | 學(xué)兵應(yīng)用主要分為駕駛技能訓(xùn)練、班組行車訓(xùn)練、比武競(jìng)賽。 |
| 數(shù)據(jù)采集及傳輸 | 數(shù)據(jù)采集 | 實(shí)時(shí)檢測(cè)轉(zhuǎn)向機(jī)構(gòu)、變速器、踏板、各種開關(guān)操作變化,并通過(guò)USB/RS232傳輸給控制計(jì)算機(jī)。 |
| 數(shù)據(jù)傳輸 | 實(shí)現(xiàn)VR設(shè)備、駕駛模擬器和軟件系統(tǒng)之間的數(shù)據(jù)采集和傳輸。 | |
| 輔助軟件 | VR交互應(yīng)用,實(shí)現(xiàn)三維數(shù)據(jù)、虛擬儀表開關(guān)由頭盔顯示。 | |
| 軟件檢測(cè) | 第三方軟件測(cè)評(píng)機(jī)構(gòu)進(jìn)行軟件功能測(cè)試 | |
| 軟件系統(tǒng)集成 | 構(gòu)建數(shù)據(jù)庫(kù) | 用于存儲(chǔ)學(xué)兵的姓名、人臉等相關(guān)信息,并通過(guò)主控電腦組織模擬訓(xùn)練。 |
訓(xùn)練建模資源
| 模塊 | 子模塊 | 詳細(xì)描述 |
|---|---|---|
| 整體地形場(chǎng)景 | 設(shè)置原則 | 數(shù)字地圖生成與動(dòng)態(tài)資源加載相結(jié)合。 |
| 地幅 | 220平方公里。 | |
| 地形 | 包括山地、丘陵、平原、沙漠、岸灘、湖泊、河流,各類地形呈區(qū)域分布。 | |
| 地貌 | 除特定地貌特征(沙漠、湖泊等),其他均有植被覆蓋。 | |
| 地物 | 自然形成、人工構(gòu)筑(平時(shí)、戰(zhàn)時(shí))。 | |
| 其他要求 | 數(shù)字地圖比例尺≥1:1000,支持網(wǎng)格數(shù)不小于4096×4096,支持衛(wèi)星圖最高像素25000×25000,地表材質(zhì)細(xì)節(jié)紋理最大分辨率為4096×4096像素。 | |
| 仿照現(xiàn)有場(chǎng)地課目建模63類 | 基礎(chǔ)駕駛14類 | 起步;直線行駛;停車;限定距離換擋;直角轉(zhuǎn)彎;"8"字形路;"S"形路;定位停車;垂直停車;斜位停車;側(cè)方停車;乘坐車坡道定點(diǎn)停車與坡道起步;乘坐車曲線行駛;乘坐車倒車入庫(kù)。 |
| 場(chǎng)地駕駛10類 | 坡道起步;上坡轉(zhuǎn)彎換擋;單凸路;橫斷路;單邊橋;雙邊橋;高架橋;圓形錯(cuò)位障礙;錯(cuò)位小巷;限制門。 | |
| 式樣駕駛3類 | 公路掉頭;倒車移位;綜合技能駕駛。 | |
| 比武駕駛13類 | 通過(guò)限制路段、通過(guò)障礙路段等。 | |
| 戰(zhàn)地駕駛15類 | 車輛掩體;山丘;側(cè)坡;蛇形障礙;燃燒路段;反坦克壕;塹壕;彈坑路;戰(zhàn)地組合障礙;通過(guò)沾染路段;通過(guò)伏擊路段;通過(guò)空襲路段;無(wú)照明條件下夜間駕駛;人員緊急救護(hù);模擬上下運(yùn)輸機(jī)。 | |
| 復(fù)雜路段駕駛8類 | 泥濘路段;涉水路段;松沙路段;卵石路段;震毀路;模擬冰雪路;模擬雨、霧天駕駛;車輛自救與互救。 | |
| 相關(guān)要求 | 所有課目按照營(yíng)區(qū)場(chǎng)地1:1進(jìn)行設(shè)計(jì)建模,符合《新訓(xùn)汽車駕駛員訓(xùn)練教材》《后勤單個(gè)人員訓(xùn)練綱目》對(duì)場(chǎng)地設(shè)置和訓(xùn)練考核標(biāo)準(zhǔn)。 | |
| 場(chǎng)地以外課目建模63類 | 比武駕駛17項(xiàng) | 通過(guò)特殊地段、通過(guò)水障礙、重裝備運(yùn)輸車通過(guò)限制路段、接力賽路段、射擊區(qū)、快速移位長(zhǎng)距離倒車等。 |
| 戰(zhàn)地駕駛7項(xiàng) | 模擬通過(guò)浮橋;摘裝、掛裝;牽引武器裝備駕駛;牽引武器裝備進(jìn)出陣地;牽引武器裝備通過(guò)復(fù)雜路段;牽引武器裝備倒庫(kù);牽引武器裝備上下鐵路平車、艦(船)。 | |
| 復(fù)雜路段駕駛4項(xiàng) | 模擬高速公路;炎熱條件下駕駛;嚴(yán)寒條件下駕駛;風(fēng)沙天駕駛。 | |
| 道路駕駛6類 | 山區(qū)道路駕駛;一般道路駕駛;沙漠戈壁地區(qū)駕駛;草原荒漠地區(qū)駕駛;高原道路駕駛;夜間駕駛。 | |
| 應(yīng)急避險(xiǎn)駕駛7類 | 車輛爆胎處置;剎車失靈處置;車輛失火處置;緊急規(guī)避障礙;車輛側(cè)滑處置;風(fēng)窗玻璃碎裂處置;發(fā)動(dòng)機(jī)突然熄火處置。 | |
| 大型特種車駕駛22類 | 起步、停車、直線行駛;轉(zhuǎn)向、換擋、制動(dòng);倒車(沿線倒車、窄路倒車、過(guò)障倒車定位、快速移位長(zhǎng)距離倒車);倒庫(kù)(庫(kù)前倒庫(kù)、"T"形倒庫(kù));轉(zhuǎn)向(直角轉(zhuǎn)彎、"S"形路、錯(cuò)位小巷);定位停車(車前定位、車中定位、車后定位、斜位停車);通過(guò)橋涵(單、雙邊橋、限制門);連續(xù)障礙路;直線限制路;平穩(wěn)駕駛;停靠貨臺(tái);倒車掛裝與牽裝倒庫(kù)。 | |
| 實(shí)景道路建模 | 開發(fā)北京市特定路段場(chǎng)景(不少于15公里),體現(xiàn)潮汐車道、堵車高峰路段、復(fù)雜立交橋、高架橋、輔路駕駛等場(chǎng)景。 | |
| 相關(guān)要求 | 所有課目均符合《新訓(xùn)汽車駕駛員訓(xùn)練教材》《后勤單個(gè)人員訓(xùn)練綱目》對(duì)場(chǎng)地設(shè)置和訓(xùn)練考核標(biāo)準(zhǔn)。 | |
| 訓(xùn)練車型 | 三維模型 | 解放CA1125J、安凱大客車、BJ80指揮車和泰安TA4360(帶半掛),包括車身、駕駛室等進(jìn)行高精細(xì)建模。 |
| 毀傷模型 | 包括輕、中、重三種遭毀傷后的三維模型,如車輛車體的形變、車輛爆炸碎片、輪胎爆炸碎片、玻璃碎片。 | |
| LOD優(yōu)化 | 模型分為兩級(jí)LOD優(yōu)化,分別為原模型面數(shù)50%和10%兩個(gè)階段LOD。 | |
| 動(dòng)力系統(tǒng) | 解放CA1125J、安凱大客車、BJ80指揮車和泰安TA4360(帶半掛)動(dòng)力系統(tǒng),滿足駕駛模擬交互操作。 | 可與泥濘路段、涉水路段、松沙路段、卵石路段、冰雪路段、高速公路六種地面依據(jù)路面工況標(biāo)準(zhǔn)進(jìn)行交互。 |
| 虛擬儀表開關(guān) | 解放CA1125J、安凱大客車、BJ80指揮車和泰安TA4360(帶半掛),按實(shí)裝儀表形狀、參數(shù)輸出方式、位置關(guān)系、大小進(jìn)行設(shè)計(jì)。 | 通過(guò)觸摸屏點(diǎn)擊、選擇、位置轉(zhuǎn)換完成操作。 |
| 其他三維模型素材 | 相關(guān)車輛 | 包括裝甲車、戰(zhàn)場(chǎng)救護(hù)車、指揮車等;民用車輛有皮卡車,SUV,乘坐車(小型、中型、大型),貨車(輕型、重型)等。 |
| 地物 | 高速收費(fèi)站,加油站,橋涵,村莊等地物不少于4種模型;輔助設(shè)施包含交通信號(hào)、道路欄桿等不少于6種模型。 | |
| 植被模型技術(shù)指標(biāo) | 植被支持alpha鏤空貼圖,基礎(chǔ)模型制作(樹木約為20000個(gè)三角面,灌木約為10000個(gè)三角面、草約為1000個(gè)三角面)。 | |
| 火力打擊素材 | 直升機(jī)、火炮、強(qiáng)擊機(jī)模型 | 支持貼圖分辨率不少于1024×1024,不少于20000個(gè)三角面,有直升機(jī)、火炮、強(qiáng)擊機(jī)打擊動(dòng)畫。 |
| 煙霧、火花、碎片效果 | 有煙霧、火花、碎片效果,不能造成系統(tǒng)卡頓。 | |
| 毀傷動(dòng)畫效果 | 火力打擊需在地面或者房屋等模型上形成簡(jiǎn)單的毀傷動(dòng)畫效果,如彈坑、碎片等。 | |
| 音響效果 | 包括爆炸聲,車輛啟動(dòng)剎車聲,飛機(jī)轟炸聲,炮彈爆炸聲,炮彈射擊聲音,子彈擊中車輛聲,人員哀嚎聲,風(fēng)聲,雨聲,撞擊聲等11種。 | |
| 時(shí)間素材 | 晝夜變化 | 包括晝夜兩種時(shí)段,隨著時(shí)間推移發(fā)生變化,模擬24小時(shí)晝夜光照變化。 |
| 天氣素材 | 天候氣象 | 包括晴天、雨天、霧天、雪天、風(fēng)沙天等五種天候,雨天、霧天、雪天、風(fēng)沙天分為三個(gè)級(jí)別。 |
| 人物模型 | 我軍士兵、軍官、敵軍、平民 | 包括我軍士兵、軍官、敵軍、平民(男女老幼)等共4類,模型要求包含骨骼動(dòng)畫,如行走、跑步、跳躍、射擊、臥倒等共8類。 |
通用運(yùn)輸車駕駛模擬器(雙座六自由度)
一.學(xué)員訓(xùn)練分系統(tǒng)
| 模塊 | 子模塊 | 詳細(xì)描述 |
|---|---|---|
| 軟件部分 | 訓(xùn)練功能 | 具備符合大綱規(guī)定課目的駕駛模擬訓(xùn)練功能。 |
| 自檢功能 | 具備系統(tǒng)自檢功能。 | |
| 引導(dǎo)提示功能 | 在訓(xùn)練模式下可開啟和關(guān)閉該功能,開啟狀態(tài)下對(duì)錯(cuò)誤操作可進(jìn)行文字和語(yǔ)言提示。 | |
| 考核功能 | 能夠?qū)崿F(xiàn)考核功能。 | |
| 性能要求 |
|
|
| 硬件部分 | 六自由度平臺(tái) |
|
| 駕駛艙體 |
|
|
| 轉(zhuǎn)向機(jī)構(gòu) |
|
|
| 油門踏板 | 根據(jù)單位編配車輛情況,任選一種實(shí)裝件改裝或自研(金屬材質(zhì)),尺寸、位置、力感、行程、顏色等與實(shí)裝一致。 | |
| 離合器踏板 | 根據(jù)單位編配車輛情況,任選一種實(shí)裝件改裝或自研(金屬材質(zhì)),位置、力感、行程、顏色等與實(shí)裝一致。 | |
| 制動(dòng)踏板 | 根據(jù)單位編配車輛情況,任選一種實(shí)裝件改裝或自研(金屬材質(zhì)),尺寸、位置、力感、行程、顏色等與實(shí)裝一致。 | |
| 駐車制動(dòng) | 根據(jù)單位編配車輛情況,任選一種實(shí)裝件改裝或自研(金屬材質(zhì)),尺寸、位置、力感、行程、顏色等與實(shí)裝一致。 | |
| 變速機(jī)構(gòu) |
|
|
| 儀表盤顯示屏(橫屏) |
|
|
| 前方視景顯示屏 |
|
|
| 左右后視鏡顯示屏 |
|
|
| 耳麥 |
|
|
| 音箱 | 滿足聲音外放需求。 | |
| 計(jì)算機(jī) |
|
|
| 主控臺(tái) | 計(jì)算機(jī)、顯示器、控制臺(tái)主體。 |
二、資源庫(kù)
| 類別 | 內(nèi)容 |
|---|---|
| 駕駛車型庫(kù) |
|
| 駕駛課目庫(kù) |
|
| 駕駛條件庫(kù)(其他三維模型素材) |
|
| 地形道路庫(kù) |
|
重裝備運(yùn)輸車駕駛模擬器(雙座六自由度)
一、學(xué)員訓(xùn)練分系統(tǒng)
| 學(xué)員訓(xùn)練分系統(tǒng) - 軟件部分 | |
|---|---|
| 核心功能模塊 |
? 駕駛操作響應(yīng)(啟動(dòng)/熄火/轉(zhuǎn)向/離合/制動(dòng)/加速) ? 高仿真環(huán)境模擬訓(xùn)練 ? 系統(tǒng)自檢功能 ? 錯(cuò)誤操作語(yǔ)音+文字提示(可開關(guān)) ? 考核評(píng)分系統(tǒng) |
| 性能要求 |
視景系統(tǒng):
? 前方/后視鏡視角與實(shí)車一致 ? 后視鏡視景可調(diào) 操作部件: ? 力感/行程/顏色與實(shí)裝一致 ? 儀表觸摸屏按實(shí)車布局設(shè)計(jì) 動(dòng)力學(xué)模型: ? 車型專用運(yùn)動(dòng)學(xué)仿真 ? 支持雨雪風(fēng)霧/晝夜場(chǎng)景生成 數(shù)據(jù)采集: ? 幀率≤20ms ? 信號(hào)采集頻率≥50Hz |
| 學(xué)員訓(xùn)練分系統(tǒng) - 硬件部分 | |
| (1) 六自由度平臺(tái) | |
| 運(yùn)動(dòng)參數(shù) |
自由度動(dòng)作:
? 滾動(dòng):±10°@±60°/s2
關(guān)鍵指標(biāo):
? 承載質(zhì)量≥500kg? 俯仰:±10°@±60°/s2 ? 偏航:±10°@±60°/s2 ? 縱蕩:±[email protected] ? 橫蕩:±[email protected] ? 垂蕩:±[email protected] ? 連續(xù)工作≥24h ? 電壓容差±10% ? 緊急斷電安全恢復(fù) |
| (2) 駕駛艙體 | |
| 規(guī)格 |
? 雙座半封閉式(玻璃鋼/金屬材質(zhì)) ? 尺寸≥1800×1500×1200mm ? 連接后總高≤2800mm |
| (3)-(8) 操作部件 | |
| 通用要求 |
? 金屬材質(zhì)實(shí)裝級(jí)改裝
? 力感/行程/顏色與實(shí)車一致 ? 變速機(jī)構(gòu)互鎖功能 ? 駐車制動(dòng)仿真 ? 離合器聯(lián)動(dòng)換擋 |
| (9)-(11) 顯示系統(tǒng) | |
| 配置要求 |
儀表盤:1920×1080@FHD 前方視景:多屏拼接≥3800×1080 后視鏡:雙屏1920×1080@FHD |
| (12)-(13) 音頻設(shè)備 | |
| 技術(shù)參數(shù) |
耳麥: ? 40mm單元/103dB靈敏度 ? 全指向麥克風(fēng) 音箱:支持環(huán)境聲效外放 |
| (14) 計(jì)算機(jī)配置 | |
| 硬件規(guī)格 |
CPU:6核12線程@4.6GHz
內(nèi)存:16GB DDR4 存儲(chǔ):1TB HDD + 256GB SSD 顯卡:8GB [email protected] 顯示輸出:4屏7680×4320 集成:內(nèi)嵌式安裝 |
| (15) 主控臺(tái) | |
| 集成計(jì)算機(jī)+顯示器+控制臺(tái)主體 | |
二.資源庫(kù)
| 類別 | 內(nèi)容 |
|---|---|
| 駕駛車型庫(kù) |
|
| 駕駛課目庫(kù) |
|
| 訓(xùn)練條件庫(kù)(其他三維模型素材) |
|
| 地形道路庫(kù) |
|
被動(dòng)式汽車駕駛模擬訓(xùn)練系統(tǒng)
一.學(xué)員訓(xùn)練分系統(tǒng)
| 1. 軟件部分 | |
|---|---|
| 核心功能模塊 |
? 駕駛操作響應(yīng)(啟動(dòng)/熄火/轉(zhuǎn)向/離合/制動(dòng)) ? 高仿真訓(xùn)練環(huán)境構(gòu)建 |
| (1)-(5) 功能要求 |
? 大綱規(guī)定課目訓(xùn)練
? 系統(tǒng)自檢功能 ? 語(yǔ)音引導(dǎo)+錯(cuò)誤扣分機(jī)制 ? 考核評(píng)分系統(tǒng) ? 訓(xùn)練場(chǎng)景動(dòng)態(tài)下發(fā) |
| (6) 性能要求 |
視景系統(tǒng):
? 多視角同步/后視鏡可調(diào) 操作部件: ? 力感/行程1:1仿真 動(dòng)力學(xué)模型: ? 車型專用運(yùn)動(dòng)學(xué)仿真 環(huán)境模擬: ? 雨雪風(fēng)霧/晝夜場(chǎng)景生成 數(shù)據(jù)采集: ? 幀率≤20ms/采集頻率≥50Hz |
| 2. 硬件部分 | |
| (1) 駕駛艙體 | |
| 規(guī)格參數(shù) |
? 單座半封閉式(玻璃鋼/金屬) ? 尺寸≥1800×1500×1200mm ? 鋼結(jié)構(gòu)承載骨架 |
| (2)-(6) 操作部件 | |
| 通用要求 |
? 金屬材質(zhì)實(shí)裝級(jí)改裝
? 轉(zhuǎn)向鎖止功能 ? 組合開關(guān)集成(燈光/雨刮/喇叭) ? 三踏板力感仿真 ? 駐車制動(dòng)聯(lián)動(dòng) |
| (7)-(10) 顯示系統(tǒng) | |
| 配置參數(shù) |
儀表盤:1920×1080@FHD 1:1顯示 前方視景:多屏拼接≥3800×1080 后視鏡:雙屏1920×1080@FHD |
| (11)-(12) 音頻設(shè)備 | |
| 技術(shù)參數(shù) |
? 耳麥:40mm單元/103dB靈敏度 ? 音箱:環(huán)境聲效外放支持 |
| (13) 計(jì)算機(jī)配置 | |
| 硬件規(guī)格 |
CPU:6核12線程@4.6GHz
內(nèi)存:16GB DDR4 存儲(chǔ):1TB HDD+256GB SSD 顯卡:8GB [email protected] 顯示輸出:4屏7680×4320 集成:內(nèi)嵌式安裝 |
| (14) 主控臺(tái) | |
| 一體化集成:計(jì)算機(jī)+顯示器+控制臺(tái) | |
二.資源庫(kù)
| 1. 被動(dòng)駕駛訓(xùn)練功能 | |
|---|---|
| (1) 基礎(chǔ)駕駛練習(xí) |
主動(dòng)引導(dǎo):
操作機(jī)件識(shí)別 被動(dòng)引導(dǎo): 單臂小幅修/大回轉(zhuǎn)/雙臂交叉轉(zhuǎn)/離合三動(dòng)等12項(xiàng) |
| (2) 進(jìn)階駕駛練習(xí) |
? 離油協(xié)動(dòng)/油制換控
? 通過(guò)"8"字/S/N形路 ? 定位停車/倒車移位 ? 14項(xiàng)綜合基礎(chǔ)駕駛 |
| 2. 駕駛車型庫(kù) | |
| 支持車型 | 解放CA1125J/豪濼1167/豪濼2197/陜汽2190N等 |
| (1) 三維模型 |
? 高精細(xì)建模≥20000三角面 ? 毀傷模型3類(輕/中/重) ? LOD優(yōu)化50%+10%層級(jí) |
| (2) 動(dòng)力系統(tǒng) |
? 泥濘/卵石/高速路面交互 ? 海拔動(dòng)力衰減模擬(1000/3000/5000米) |
| 3. 駕駛課目庫(kù) | |
| (1) 場(chǎng)地駕駛 | 直角轉(zhuǎn)彎/側(cè)方停車/S形路等14課目 |
| (2) 道路駕駛 | 城市/高速/山區(qū)/沙漠等15課目 |
| (3)-(10) 綜合訓(xùn)練 |
? 組合限制路段9類
? 自然障礙7類 ? 特殊天候5種 ? 應(yīng)急避險(xiǎn)8場(chǎng)景 ? 交通事故3類 |
| 4. 駕駛條件庫(kù) | |
| (1) 交通元素 |
? 民用車輛≥10種 ? 行人類型≥15種 ? 自主交通AI(會(huì)車/避障) |
| (3) 植被模型 |
? 樹木10000面/4級(jí)LOD
? 物理碰撞屬性 ? 毀傷分段模型 ? 1024*1024貼圖 |
| (4)-(7) 環(huán)境系統(tǒng) |
? 6種天候(3級(jí)細(xì)分) ? 24小時(shí)動(dòng)態(tài)光照 ? 人物骨骼動(dòng)畫(8類動(dòng)作) |
| 5. 地形道路庫(kù) | |
| (1) 整體地形 |
? 150平方公里建模 ? 高程數(shù)據(jù)米級(jí)精度 ? 動(dòng)態(tài)加載延遲≤1s ? 60fps渲染幀率 |
| (4)-(14) 專項(xiàng)地形 |
城市道路:
三車道/隔離帶/信號(hào)系統(tǒng) 高速公路: 全封閉/120km限速 特殊路段: 1.2m涉水/冰雪/松沙 運(yùn)輸場(chǎng)景: 鐵路平車/艦船/運(yùn)輸機(jī) |
汽車模擬駕駛系統(tǒng)
| 序號(hào) | 模塊名稱 | 關(guān)鍵參數(shù)及功能描述 |
|---|---|---|
| 1 | 汽車駕駛模擬座艙(VR) | 三自由度動(dòng)態(tài)支架(尺寸1850×900×1500mm±10%),靜態(tài)承重500kg;含五大真車操作件(轉(zhuǎn)向器、油門等),ABS材質(zhì)檔位外罩,安全暫停按鈕。 |
| 2 | 儀表盤顯示 | 實(shí)裝儀表實(shí)時(shí)通訊,支持時(shí)速表、轉(zhuǎn)速表、燈光指示、報(bào)警燈等,動(dòng)態(tài)與靜態(tài)性能符合實(shí)車標(biāo)準(zhǔn)。 |
| 3 | 轉(zhuǎn)向器 | 轉(zhuǎn)向范圍0-1060°,脈沖分級(jí)≥180/圈,自動(dòng)回正;油門/剎車信號(hào)分級(jí)≥5級(jí)或無(wú)級(jí)輸出。 |
| 4 | 變速器 | 模擬實(shí)車檔位,顯示屏顯示檔位,操縱力10N~50N。 |
| 5 | 制動(dòng)踏板 | 行程50-135mm,力≤100-500N,力感/行程可調(diào)。 |
| 6 | 離合器踏板 | 行程50-120mm,力20-150N,力感/行程可調(diào)。 |
| 7 | 加速踏板 | 行程50-100mm,力20-100N,力感/行程可調(diào)。 |
| 8 | 駐車制動(dòng)器操縱桿 | 拉力20-100N,力感/行程可調(diào)。 |
| 9 | 傳感器 | 模擬/數(shù)字信號(hào),聲像同步(滯后<30ms),音量≥5級(jí),力度適配成人。 |
| 10 | 制動(dòng)裝置 | 獨(dú)立行車/駐車制動(dòng),制動(dòng)有聲效。 |
| 11 | 加速器 | 運(yùn)動(dòng)中無(wú)卡滯。 |
| 12 | 安全帶 | 伸縮自如,自動(dòng)回位。 |
| 13 | 汽車座椅 | 專業(yè)座椅,前后/高度可調(diào),含三點(diǎn)式安全帶。 |
| 14 | 操作終端 | 麒麟Linux系統(tǒng),F(xiàn)T-D2000 CPU,8GB內(nèi)存,256GB SSD+2TB HDD,Radeon 520顯卡,23.8寸屏。 |
| 15 | 顯示器(VR款) | 高清VR頭盔,沉浸式軟件系統(tǒng)。 |
| 16 | 模擬駕駛屏 | 49寸屏,分辨率3840×1080,刷新率144Hz,曲率1800R,接口HDMI/AUDIO。 |
| 17 | 動(dòng)感平臺(tái) | 三自由度并聯(lián)機(jī)構(gòu),支持位移/角度/加速度匹配,負(fù)荷≥400kg,俯仰/側(cè)傾±7°,響應(yīng)≤30ms。 |
| 18 | 互換性模塊 | 電接觸良好,插接點(diǎn)互換。 |
| 19 | 學(xué)員與考核系統(tǒng)信息管理模塊 | 綁定學(xué)員賬號(hào),記錄模擬數(shù)據(jù),支持錄屏與回放。 |
| 20 | 軟件界面模塊 | 主界面顯示油門/剎車進(jìn)度,135°廣角視景,后視鏡可調(diào)。 |
| 21 | 模擬儀表顯示模塊 | 顯示時(shí)速/轉(zhuǎn)速/操作進(jìn)度。 |
| 22 | 畫面選擇模塊 | 可開關(guān)后視鏡、地圖、錯(cuò)誤提示等。 |
| 23 | 基礎(chǔ)駕駛模塊 | 起步、直線、換擋、轉(zhuǎn)向、制動(dòng)、倒車訓(xùn)練。 |
| 24 | 場(chǎng)地駕駛模塊 | 坡道起步、單邊橋、限制門等復(fù)雜場(chǎng)地訓(xùn)練。 |
| 25 | 復(fù)雜路段駕駛模塊 | 泥濘、涉水、冰雪等特殊路段模擬。 |
| 26 | 夜間駕駛模塊 | 有/無(wú)照明條件下夜間駕駛。 |
| 27 | 戰(zhàn)地駕駛模塊 | 掩體、燃燒路段、反坦克壕等戰(zhàn)場(chǎng)場(chǎng)景。 |
| 28 | 道路場(chǎng)景數(shù)據(jù)庫(kù)模塊 | 含泥濘/石子/涉水/山區(qū)/城市/高速/危險(xiǎn)場(chǎng)景等7類道路模型。 |
| 29 | 地面模型模塊 | 地物模型≥4種,貼圖分辨率≥1024×1024,三角面≥5000。 |
| 30 | 植被模型模塊 | 支持鏤空貼圖,LOD分層(最高10000面,最低50面),物理碰撞屬性。 |
| 31 | 效果素材模塊 | 煙霧/爆炸/音響效果,支持6類環(huán)境音效。 |
| 32 | 時(shí)間素材模塊 | 模擬24小時(shí)晝夜光照變化。 |
| 33 | 應(yīng)急避險(xiǎn)課目模塊 | 制動(dòng)失靈、爆胎、碰撞等15種緊急場(chǎng)景訓(xùn)練。 |
| 34 | 地形道路庫(kù)模塊 | 地形≥200km2,支持衛(wèi)星貼圖,道路總長(zhǎng)≥100km,含山地/平原等。 |
| 35 | 測(cè)試調(diào)整功能模塊 | 支持方向機(jī)/離合器/油門/制動(dòng)器/變速器等部件測(cè)試。 |
| 36 | 虛擬車輛模型模塊 | 12種車型建模(含大客/皮卡/軍用等),精細(xì)駕駛室模型。 |
| 37 | 不良天氣和夜間場(chǎng)景建模 | 雨/霧/雪/沙塵及夜間場(chǎng)景真實(shí)模擬。 |
| 38 | 仿真動(dòng)力系統(tǒng) | 車輛動(dòng)力數(shù)學(xué)模型,支持駕駛交互操作。 |
部隊(duì)車輛駕駛仿真模擬器

模擬駕駛導(dǎo)調(diào)及綜合管理

訓(xùn)練平臺(tái)應(yīng)用功能